 |
Recent technological developments have enhanced robotics-related applications to a variety of strategic application areas such as industrial automation, ICT for health, and technology-enhanced learning to name a few. The above examples of smart systems are indicative in the sense that human users/agents are an essential part of the overall system. In industrial automation human users would need to interact with robots in a physical way, e.g., in semi-autonomous manufacturing as well as in a logical/cognitive way, e.g., when commanding robots in autonomous warehouse solutions. In ICT for health robots would interact both physically and cognitively with both medical personnel and patients. In technology-based education human users would come into contact with robots acting as educational agents.
The project goal is to develop a systematic, bi-directional short- and long-term adaptive framework that yields safe, effective, efficient, and socially acceptable robot behaviors and human-robot interactions.
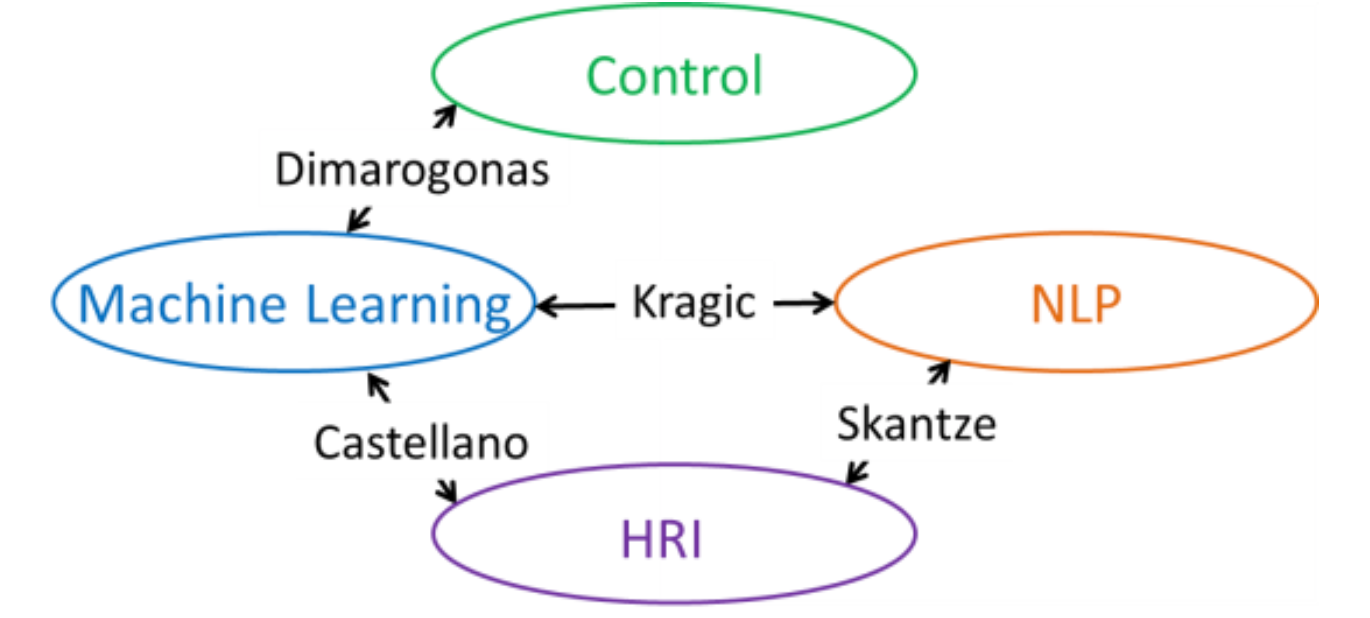
The research topics involved in the development of the targeted methodology include
methods for correct-by-design task planning, re-planning and robot control under uncertainty and model adaptation based on formal verification;
techniques for learning of predictive state representation;
long-term adaptive reinforcement learning approaches for affect-based co-adaptation in social human-robot interaction; and
short-term adaptation of physical and expressive/linguistic human-robot interaction.
Through the developed framework, we achieve: correctness in the sense that the temporal logic specifications expressing safety requirements are by-design guaranteed to hold at all times; effectiveness in the sense that high-level action and motion plans accomplish the task temporal logic in the maximally satisfying way; social acceptability in the sense that social situations are understood and robots adapt to these in a contingent way over short and long periods of time; and efficiency in the sense that the robots act autonomously and underlying computations take place in real-time.
|
|
Scenario 1: Human in the loop control of robots
Similarly as in the RECONFIG project, in this demonstrator, an autonomous robot will be assigned safety requirements and a symbolic long-term temporal logic task, such as surveillance or transportation of objects or data. In contrast to RECONFIG, where all agents in the multi-agent system were controllable, this scenario will deal with a multi-agent system involving uncontrollable agents, i.e., humans. We aim to demonstrate that the robot’s behaviors will be at all times safe and effective with respect to the temporal logic formulas and optimal with respect to metrics reflecting the social acceptability.
Scenario 2: Social human-robot interaction for education
Building on research experience in the EMOTE project on the topic of robotic tutors1, we will develop a scenario in the area of robot-supported learning for early secondary students where a robot acts an educational agent to facilitate student learning. This scenario aims to exploit the iterative bidirectional learning, planning and control as a tool for personalization of the educational experience. Learning tasks supported by the robot offer the ideal test-bed to study the effects of context-sensitive, affect- based co-adaptation approaches through the optimization of robot support and instruction in order to achieve personalized interactions that can lead to increased task performance.